


编者按:他们创办的公司或已是独角兽,或刚启动种子轮,或已家喻户晓,或长期身居幕后,或正起于微末,但他们都是中国新经济的微观脉搏,是这轮产业和技术升级的微观主导者和实践者,不同行业成千成万的他们的身影汇聚,投射变革的洪流。
由财联社和《科创板日报》联合发起的 “连线创始人/CEO”栏目,主要关注创新创业型企业,以企业创始人/CEO的访谈为一手信源,让成长中的创业公司走入公众和市场视野,并发掘最新技术和产业趋势。

《科创板日报》9月12日讯(记者 李明明) 在近期多场机器人行业赛事和展会中,一个显著趋势正在显现:不仅多家机器人本体企业展出的产品普遍搭载了各类灵巧手以提升性能,还有不少灵巧手产业链企业也主动参与其中,通过展示核心技术与解决方案,加强与整机厂商的对接合作。
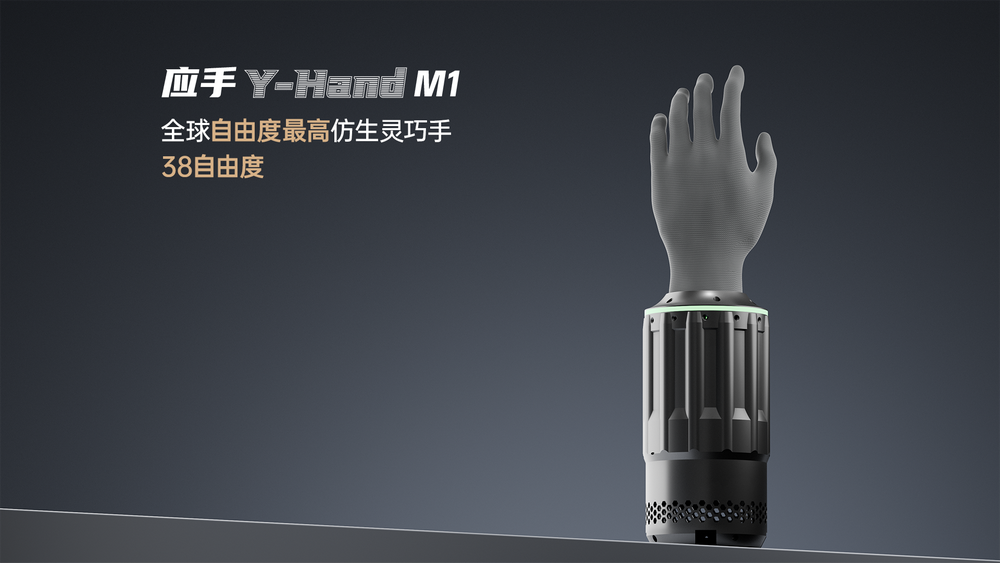
作为灵巧手和仿生人形机器人新锐,月泉仿生近期发布全球自由度最高的仿生拉压体灵巧手应手Y-Hand M1、灵敏触觉感知仿生手信手X-Hand M1、全球最小底盘轮式人形机器人博文W-Bot及全尺寸通用人形机器人博行X-Bot。
近期,《科创板日报》记者专访了月泉仿生联合创始人、英国曼彻斯特大学终身教授任雷,就公司的灵巧手新品特点和灵巧手领域未来发展趋势等话题展开对谈。
任雷表示,灵巧手领域,未来智能融合成为重点,多模态感知(触觉+视觉+力觉)+AI抓取算法成为新一轮差异化焦点。医疗康复(假肢、远程手术)、人形机器人(特斯拉Optimus百万台规划)、工业柔性装配(3C、新能源电池)三大赛道同步放量,预计2028年灵巧手整体市场规模突破880亿元人民币。
双线布局高端与通用市场
随着人形机器人行业发展势头迅猛,众多科研团队与企业持续发力,推动技术突破不断涌现。在这一进程中,灵巧手作为人形机器人与环境交互的最终执行端,其综合性能不仅是衡量整机可用性的关键指标之一,更成为下一阶段产业链竞逐的核心技术焦点。
在此背景下,灵巧手供应商纷纷在提升研发速度。
月泉仿生成立于2022年,由中国科学院院士、吉林大学教授、国际仿生工程学会名誉理事长任露泉院士,与英国曼彻斯特大学终身教授、国家特聘专家、教育部长江学者任雷教授共同创立,依托任雷教授国际首创的“仿生拉压体机器人理论与技术”,公司重点涵盖仿生人形机器人、具身智能机器人、仿生智能等重大产业领域,为仿生具身智能产业提供全新仿生解决方案。
月泉仿生近期发布全球自由度最高的仿生拉压体灵巧手应手Y-Hand M1、灵敏触觉感知仿生灵巧手信手X-Hand M1,谈及两款灵巧手(X-Hand通用型与Y-Hand高端型)的差异化定位,任雷介绍,属性上,信手X-Hand M1为刚性灵巧手,应手Y-Hand M1为仿生拉压体灵巧手,两者最主要的差异为技术架构与核心性能的差异化:
信手 X-Hand M1 采用全面的仿生设计,拥有类人手的尺寸与节段比例,在核心技术层面,信手X-Hand M1采用高功率密度电机矩阵,搭配单手 530 个触觉传感单元实现灵敏触觉感知。
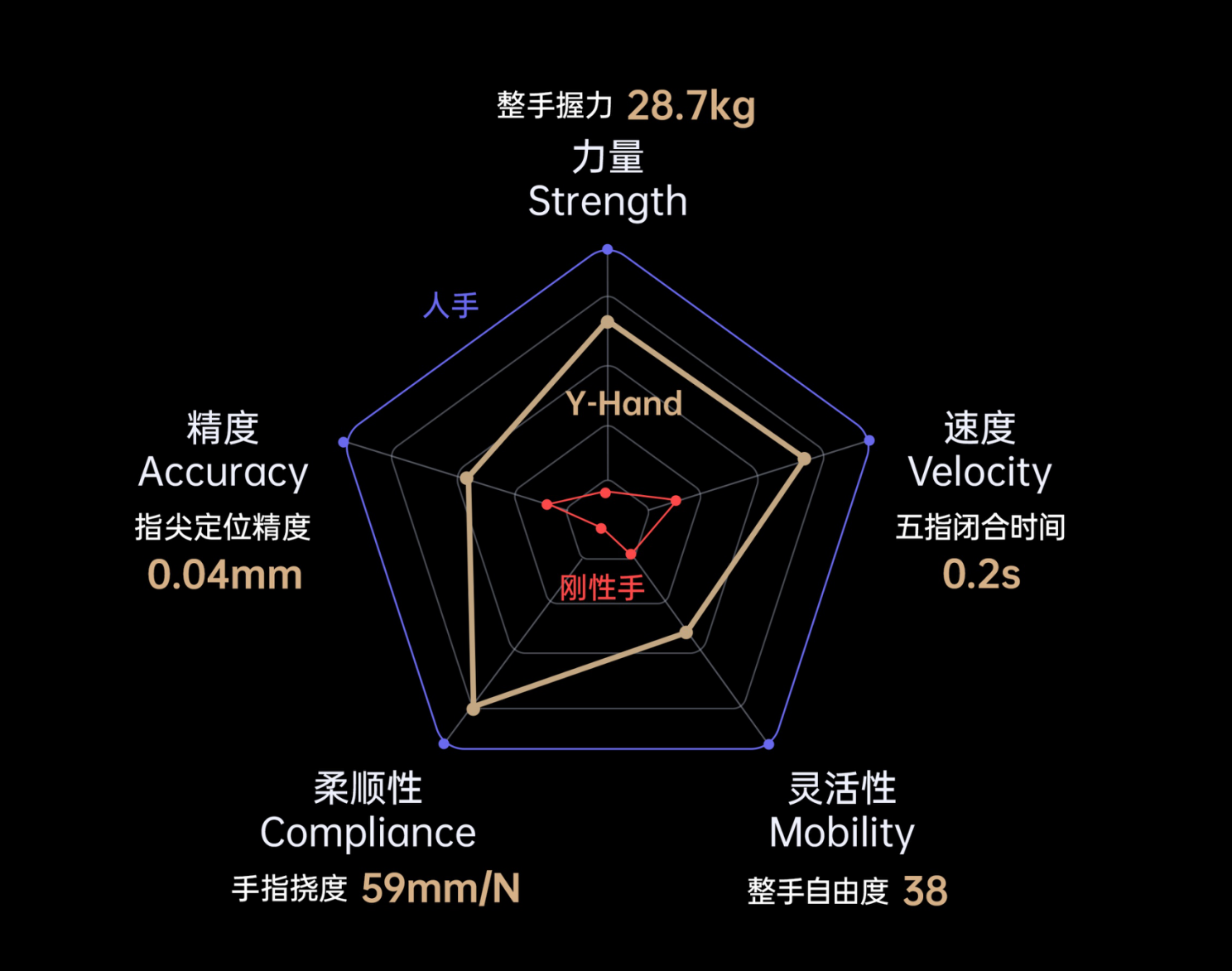
应手 Y-Hand M1则基于国际首创的“仿生拉压体机器人理论与技术”,以 38 个自由度的全球最高配置实现 “力量、速度、精度、灵活性、柔顺性” 五位一体突破,可完成复杂多样的类人灵巧抓握和操控动作。
其中,力量方面,应手Y-Hand M1整手握力达到28.7kg,超出传统刚性灵巧手6倍以上,可满足多种高负载类人抓握与操控需求;速度上,应手Y-Hand M1五指闭合动作仅需0.2秒即可完成,反应速度接近人手水平,是刚性灵巧手的3倍以上。
从核心零部件到整机研发,月泉仿生瞄准多场景市场需求
如今,月泉仿生从专注仿生机器人核心零部件(灵巧手、机械臂、下肢)到全尺寸人形机器人整机研发,谈及战略决策背后的考量,任雷表示,主要是经过市场需求评估与技术趋势的深度洞察:从市场需求看,各行业对机器人的多功能、高适配性需求日益增长。尤其是在工业领域,高精度装配、复杂环境作业等任务需要机器人具备灵活的手部操作与稳定的全身运动能力;在服务行业,与人的自然交互、复杂场景通行等场景要求机器人拥有类人的外形与运动模式。所以,无论是全尺寸通用人形机器人还是轮式人形机器人能更好地融入人类工作与生活空间,操作各类工具设备,满足多场景需求。
从技术趋势而言,核心零部件技术的成熟为整机研发筑牢根基。
任雷介绍,博文W-Bot以结构与技术双重创新重构轮式人形机器人形态逻辑。0.2㎡超小底盘使其灵活穿梭复杂空间,下肢采用仿生髋-膝-踝三折叠结构,并结合全身层级神经网络运动平衡控制,实现了操作范围的极大拓展:下蹲时能精准操作地面物体,直立后可触及 2.2 米高度的作业范围。
博行X-Bot在运动控制方面,通过自研的 WBC(全身动力学控制) + MPC(模型预测控制)技术,使机器人能持续自主学习、迭代行走步态,适应复杂地形与任务。
从降低人工误差率角度来看,人工操作受限于人体生理特性,手部颤抖、肌肉疲劳及长时间作业导致的注意力衰减,在芯片引脚焊接时难以保证每一次焊接位置的精准一致性,在微型电容装配中也易因操作力度不均、视觉判断偏差出现位置偏移、元件损坏等问题。
“在芯片引脚焊接场景中,应手Y-Hand M1 能以0.04mm的超高定位精度,从根本上规避人工操作中因位置偏差引发的虚焊、短路;在微型电容装配时,同样可通过精准的位置校准,避免元件放置偏移或压损,大幅降低人工操作带来的随机性误差,为良率稳定提升提供核心支撑。”任雷表示。

3-5年核心部件国产化成关键,2028年市场规模有望突破880亿
记者注意到,截至2025年,灵巧手领域的市场竞争格局呈现多元主体并存、技术路线快速分化、区域竞争加剧的态势。主要包括,参与者类型三分天下,其中,包括本体自研派、灵巧手新势力、零部件延伸派。
本体自研派以特斯拉、Figure AI、智元、宇树、星动纪元等头部人形机器人厂商为代表,普遍采用“全栈自研”策略,将灵巧手作为整机系统的核心部件同步开发,强调与整机在运动控制、感知融合上的深度耦合;
灵巧手新势力,则以月泉仿生、因时机器人、灵巧智能、帕西尼感知、强脑科技、傲意科技、灵心巧手等初创公司专注灵巧手单品,普遍具备高校/实验室背景,产品已落地医疗康复、工业抓取、科研教育等场景,部分月订单破千台;
零部件延伸派,包括雷赛智能(驱控)、海昌新材(超小模数齿轮)、鸣志电器(空心杯电机)等上游核心零部件厂,凭借同源技术横向切入,提供减速、驱动、传动或触觉模组,降低整机厂BOM成本并缩短开发周期。
谈及灵巧手领域未来发展趋势,任雷认为,智能融合成为重点,多模态感知(触觉+视觉+力觉)+AI抓取算法成为新一轮差异化焦点。医疗康复(假肢、远程手术)、人形机器人(特斯拉Optimus百万台规划)、工业柔性装配(3C、新能源电池)三大赛道同步放量,预计2028年灵巧手整体市场规模突破880亿元人民币。
任雷进一步表示,当前灵巧手行业处于“技术快速收敛、成本曲线下探、场景多点爆发”的关键窗口期。海外龙头掌握高精尖技术与高端材料,国内厂商依托庞大下游需求、政策补贴和供应链优势,以“性能够用+价格腰斩”策略加速国产化。未来3–5年,能否在核心零部件(微型电机、柔性触觉、减速器)实现规模化国产突破,将决定本土企业能否由“跟跑”转为“并跑”甚至“领跑”。
仿生技术未来有着广阔的发展空间,在多个维度呈现出显著趋势,这对月泉仿生而言,既是难得的机遇,也带来了一定挑战。



